
FTX Series
High Force Electric Actuator
Industrial - Exlar
Benefits:
Features:
Industrial - Exlar
Benefits:
Features:
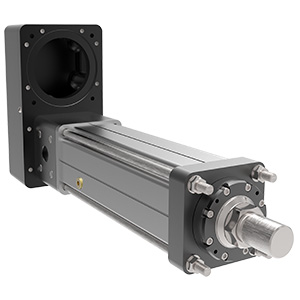
The FTX Series high force electric linear actuators have been meticulously engineered to streamline the conversion from conventional hydraulic to electric actuation. With its implementation of a planetary roller screw-based electric actuator, it delivers an impressive 15 times longer lifespan and twice the force density when compared to traditional ball screw-based electric actuators. As a result, the FTX Series stands out as the superior option for transitioning from hydraulic to electric actuation.
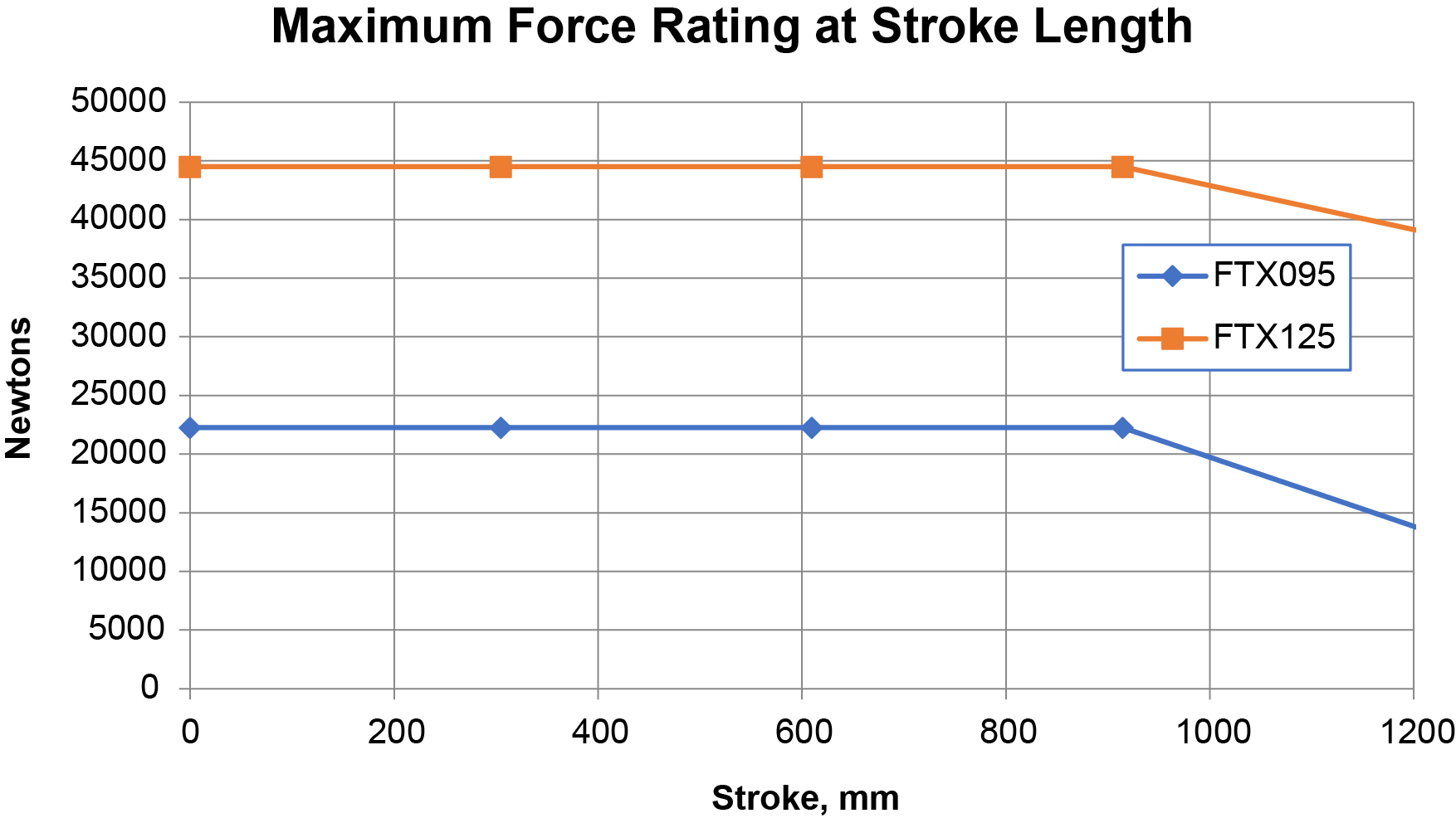
| Model | Frame Size mm (in) | Strokes mm (in) | Max Continuous Force kN (lbf) | Max Speed mm/s (in/s) |
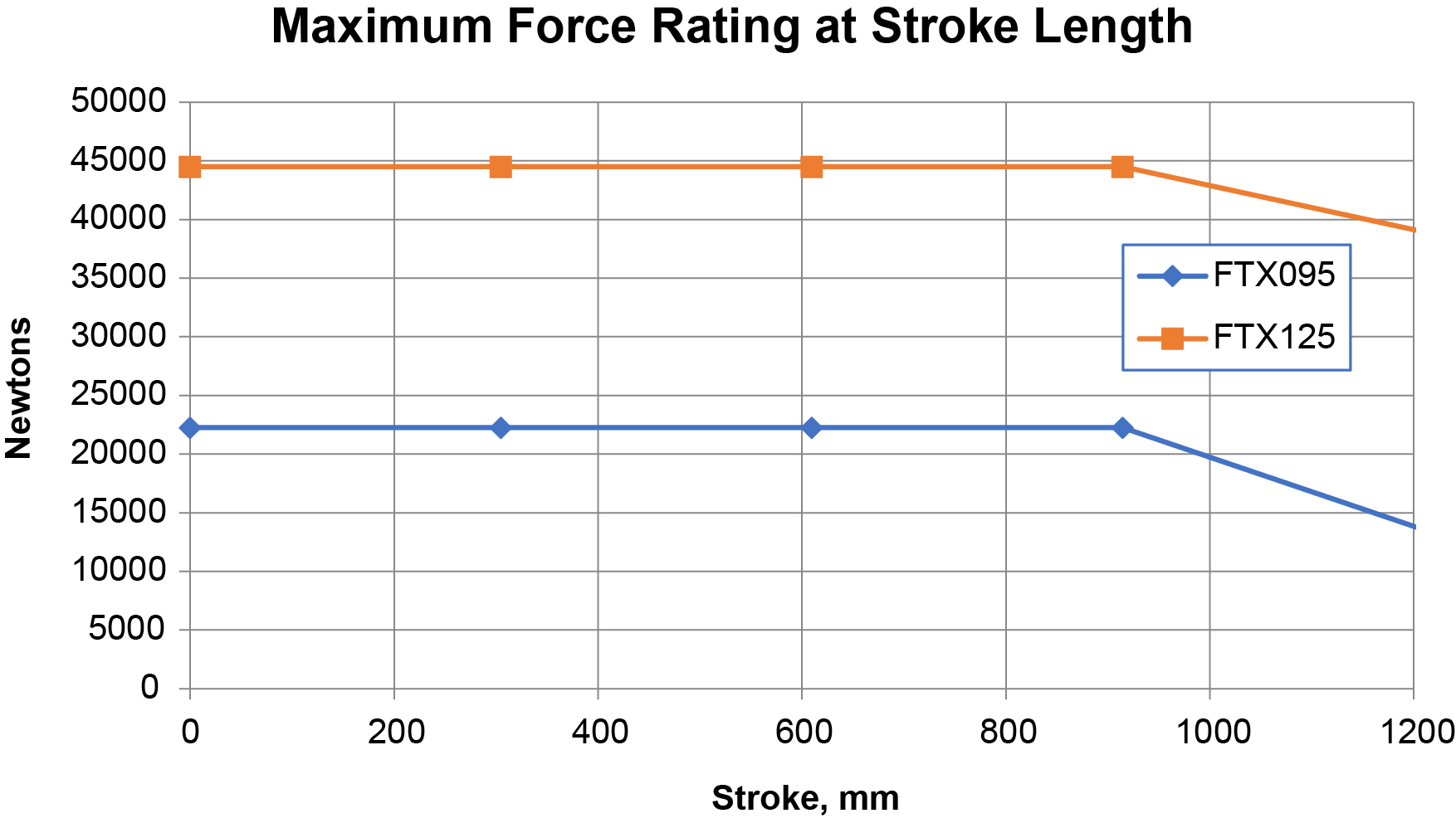
| FTX095 | 95 (3.7) | 150 (6), 300 (12), 600 (24), 900 (36), 1200 (48) | 22 (5,000) | 1,500 (59.3) |
| FTX125 | 125 (5.0) | 44 (10,000) | 583 (23.0) | |
| FTX160 | 160 (6.3) | 89 (20,000) | 1,000 (39.0) | |
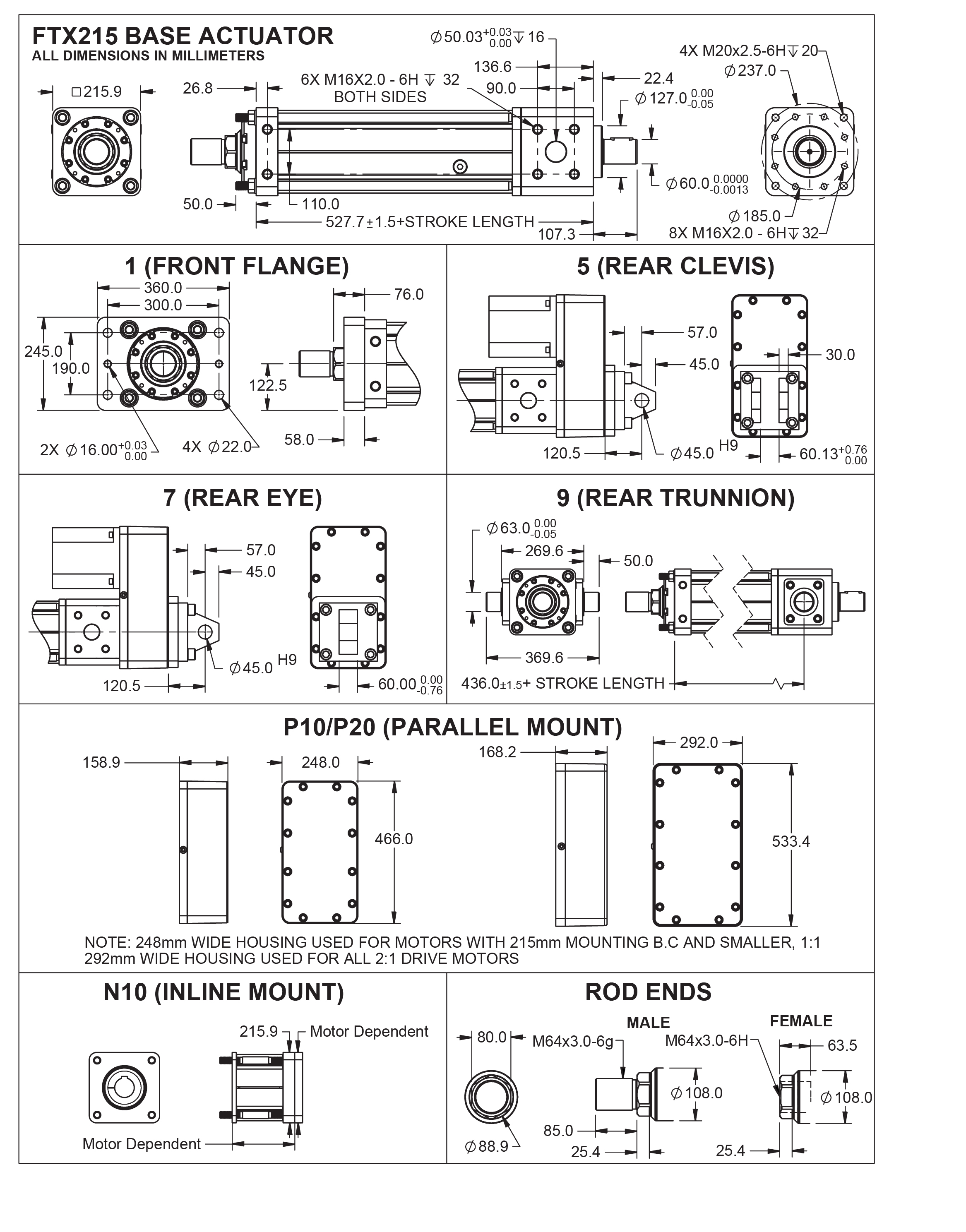
| FTX215 | 215 (8.5) | 178 (40,000) | 875 (34.0) |
Rugged and Reliable
Hydraulic cylinders are commonly installed in harsh industrial settings. Therefore, all FTX Series models are environmentally sealed to IP65. In addition, its planetary roller screw mechanism withstands significantly higher shock loads than weaker ball screw alternatives. Migrate to electric with confidence knowing the FTX Series is every bit as rugged and reliable as the hydraulics they are designed to replace.
Long Stroke Actuator
The FTX Series actuator offers a range of stroke lengths up to 48 inches (1200 mm), providing you with the versatility to fulfill your specific application requirements. Whether for a conveyor system or a hatch, the FTX high force actuator will give you the control you need.
Minimal Maintenance
More and more machine builders are looking to eliminate the mess and downtime associated with hydraulic fluid leaks. Electric actuation not only eliminates the problems associated with fluid leaks, but it also offers significantly higher levels of performance and flexibility than is possible even with servo-hydraulic solutions. The FTX Series roller screw actuators provide machine builders with the means to fulfill the escalating performance requirements of their clientele, all the while reducing or eradicating the maintenance challenges linked to conventional hydraulic alternatives.
Related Industries
|
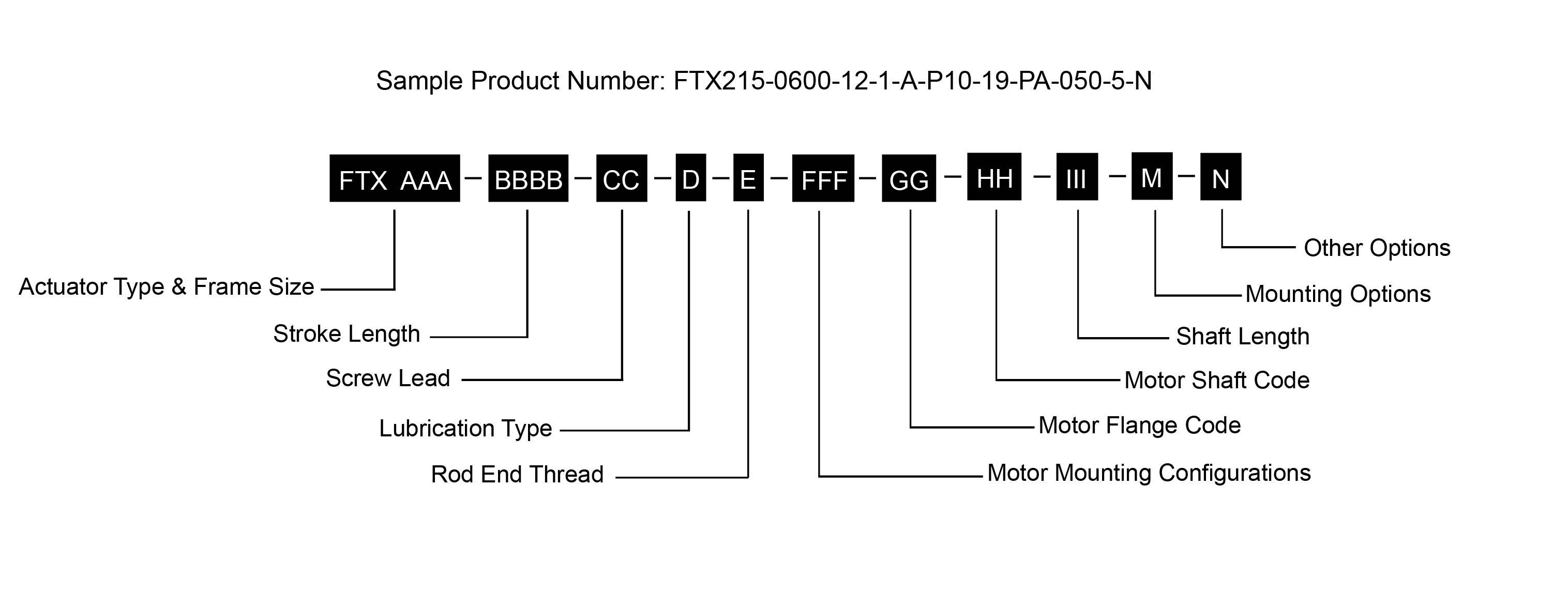
AAA = Frame Size |
FFF = Motor Mounting Configurations1 |
NOTES:
1. Always discuss your motor selection with your local sales representative.
2. Not available with inline or NMT motor mount, contact your local sales representative.
3. Available option. May add lead time
* Some options are not available with every configuration. For options or specials not listed above contact your local representative.
Adjustable External Travel Switche(s)
External travel switches indicate travel to the controller and are adjustable for either the home or end position.
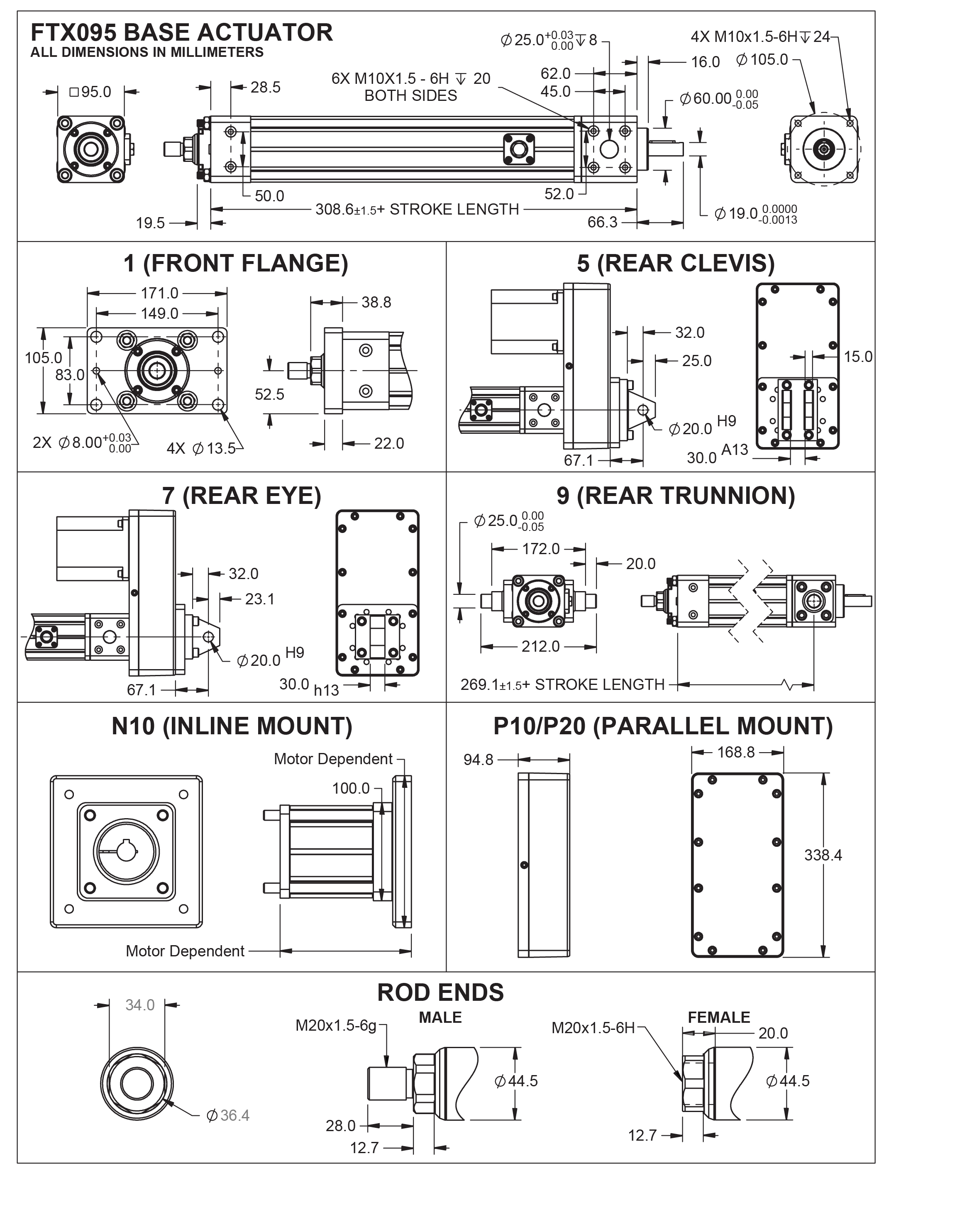
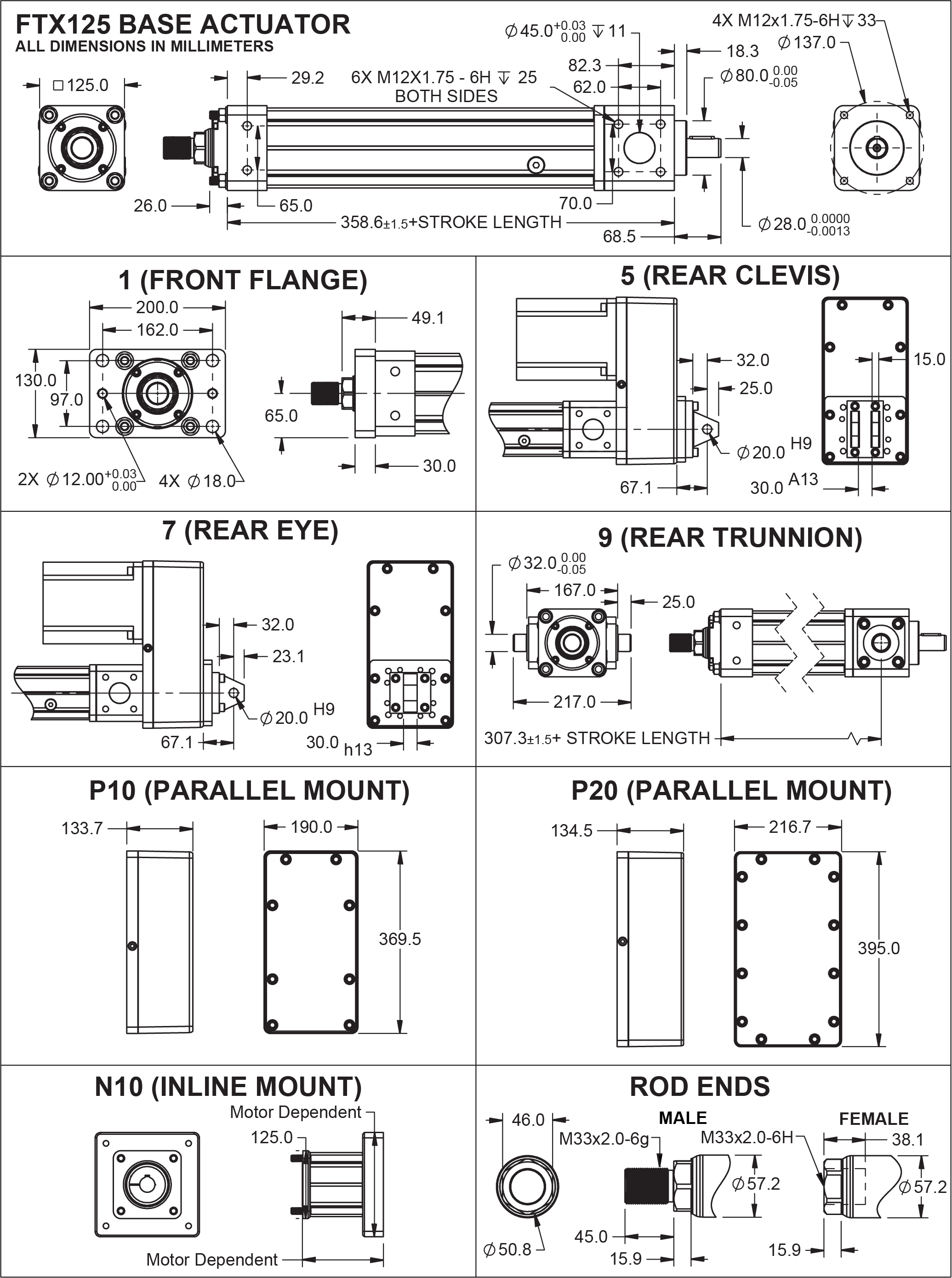
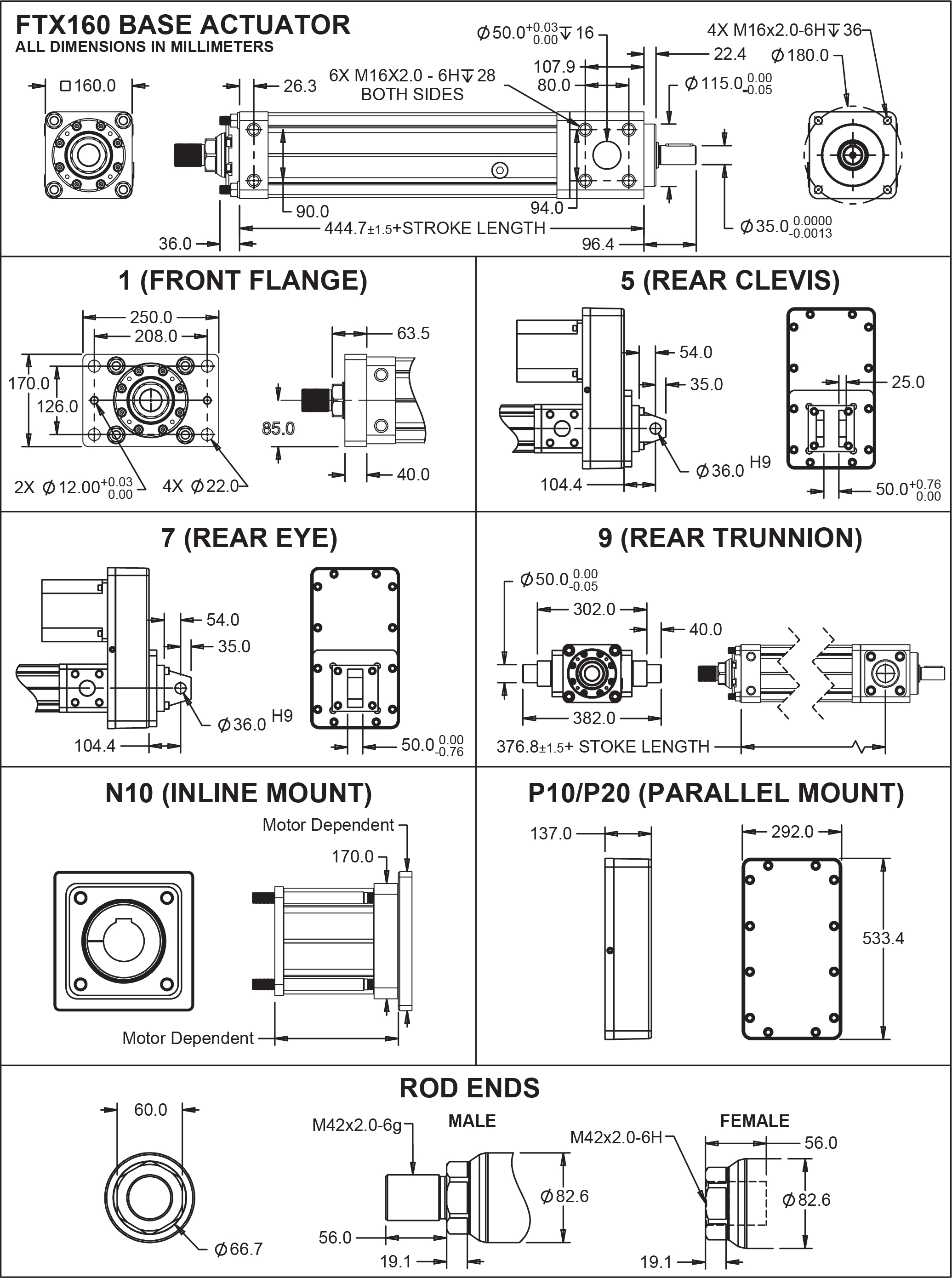
Front Mounting Flange
Front mounting flange, includes thru-holes for face-mounting
Rear Clevis, Metric
Rear clevis mount, allows actuator to pivot while in motion
Rear Eye Mount
Rear eye mount, allows actuator to pivot while in motion
Rear Trunnion Mount
A rear trunnion is a cylindrical protrusion used as a mounting or pivoting point.
Grease
FTX Series actuators are shipped from the factory fully lubricated with high temperature grease. Exlar uses Mobilith SHC 220, a high performance, extreme-pressure grease.
Low Temperature Grease
For low temperature applications, the FTX Series uses Mobilgrease 28. This grease is suitable for actuator applications in ambient temperature ranges from -40°C to 85°C.
Oil
The FTX Series use Mobil SHC 626 for oil fill. The actuator is shipped empty and only receives a light oil coating from the factory for initial test.





|
Back to Top
| 5 | 10 | 20 | ||
|---|---|---|---|---|
| Screw Lead | mm | 5 | 10 | 20 |
| in | 0.197 | 0.394 | 0.787 | |
| Maximum Force* | kN | 22.2 | 22.2 | 22.2 |
| lbf | 5,000 | 5,000 | 5,000 | |
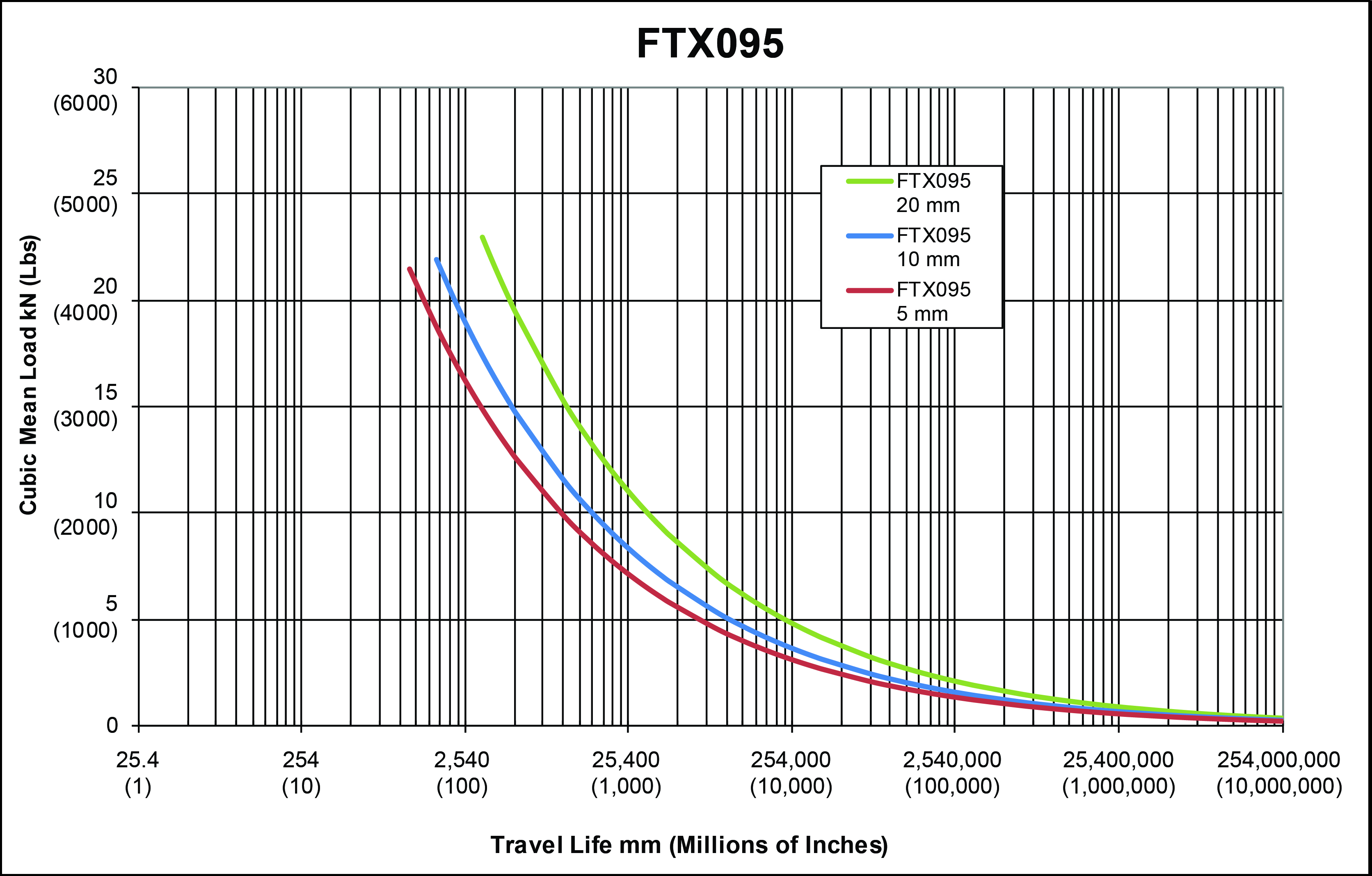
| Life at Maximum Force | km | 392 | 626 | 1440 |
| in x 10^6 | 15.4 | 24.6 | 56.7 | |
| C_a (Dynamic Load Rating) | kN | 95.2 | 88.3 | 92.5 |
| lbf | 21,400 | 19,850 | 20,800 | |
| Maximum Input Torque | Nm | 22.1 | 44.3 | 88.5 |
| lbf-in | 196 | 392 | 783 | |
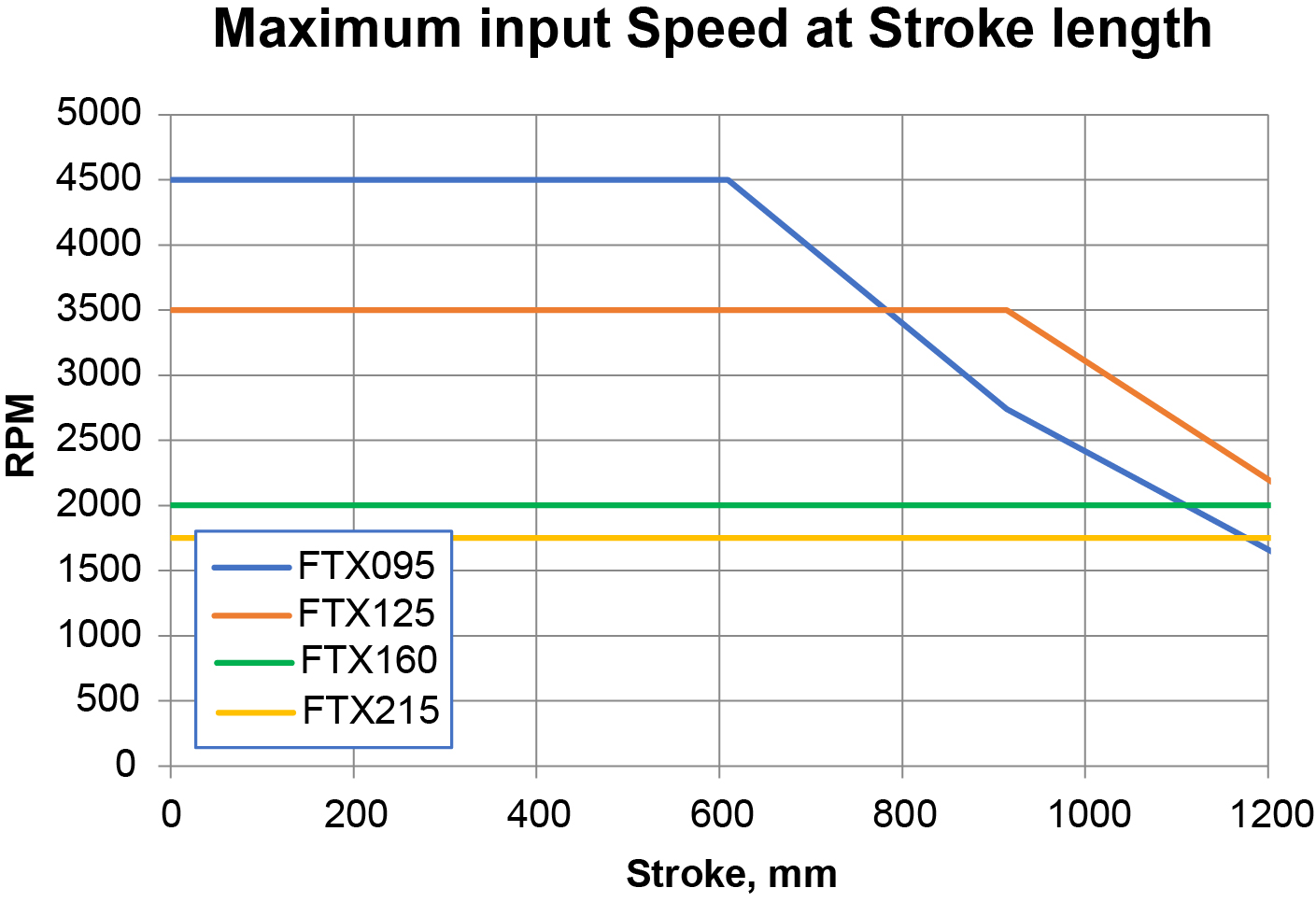
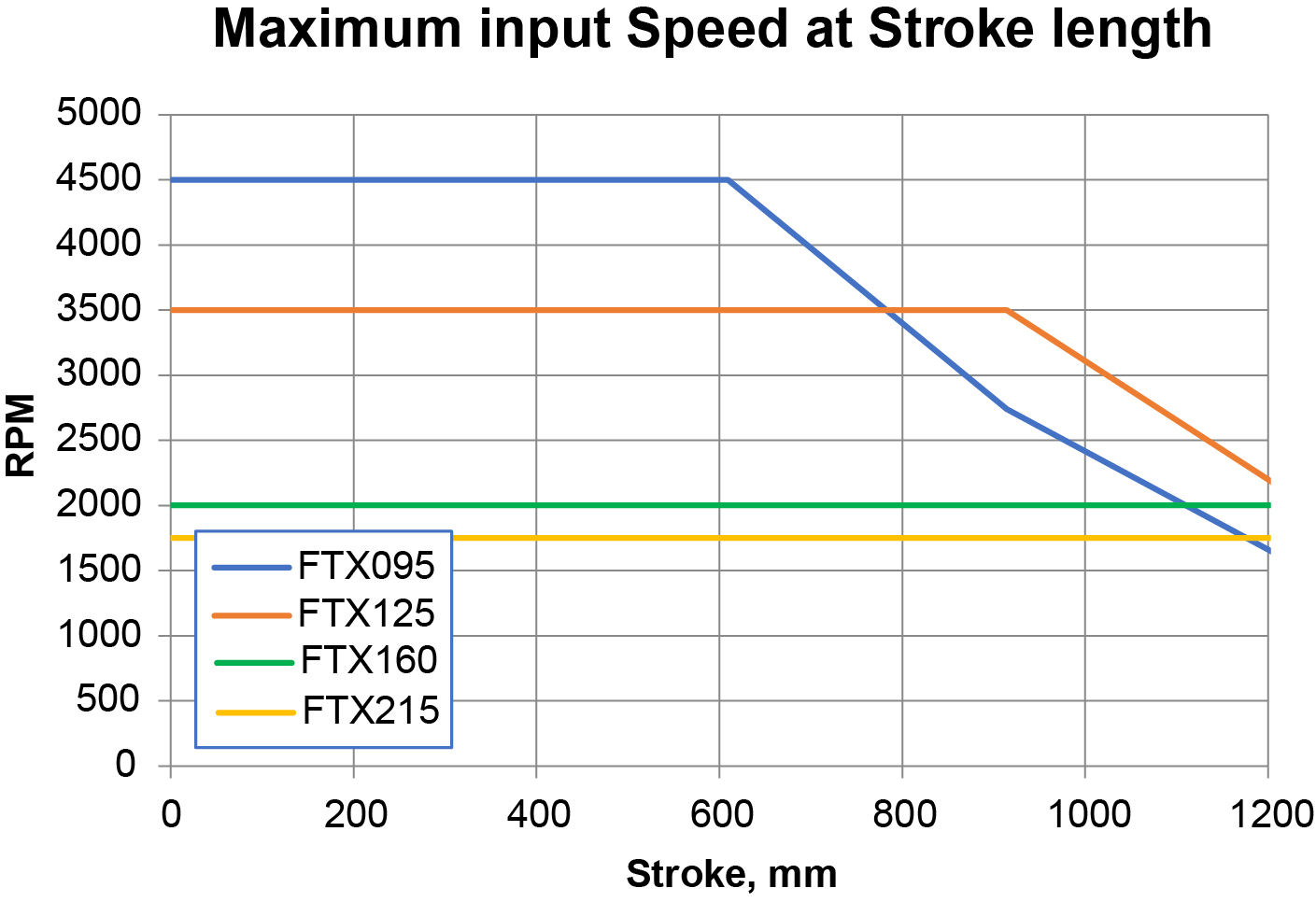
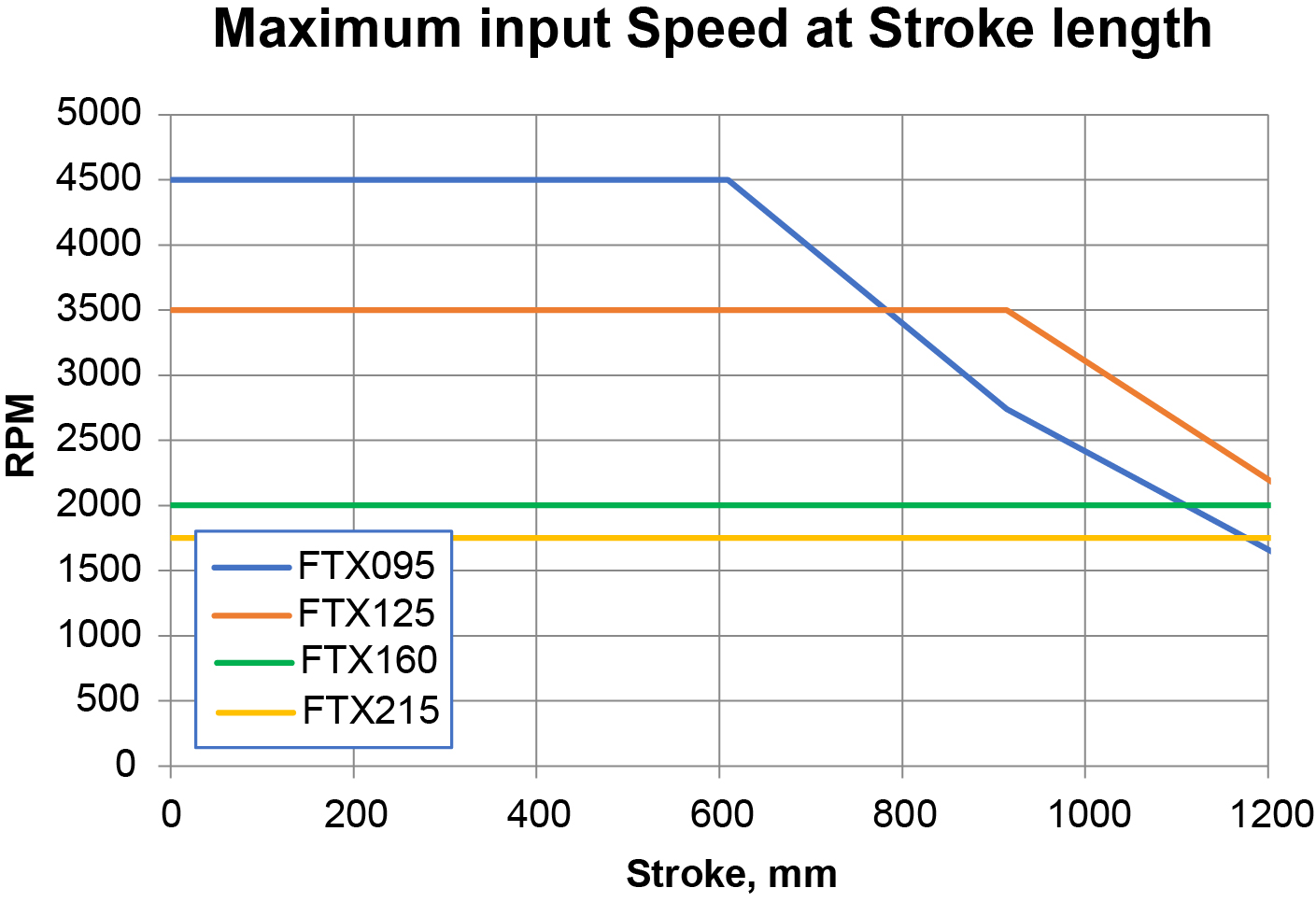
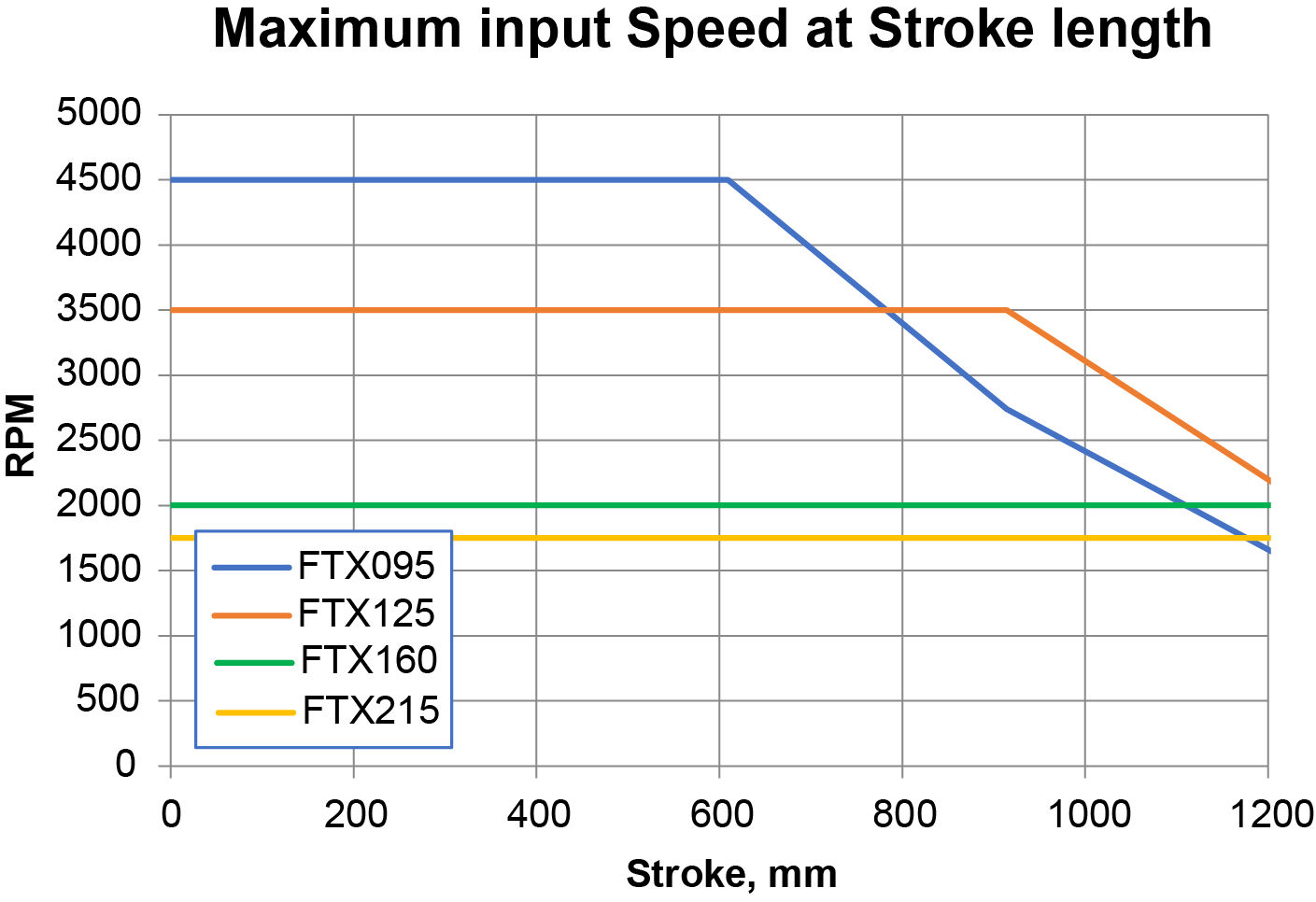
| Max Rated RPM @ Input Shaft | RPM | 4,500 | 4,500 | 4,500 |
| Maximum Linear Speed @ Maximum Rated RPM | mm/sec | 373 | 750 | 1,500 |
| in/sec | 14.7 | 29.5 | 59.3 | |
| Friction Torque | Nm | 1.12 | 1.12 | 1.12 |
| lbf-in | 10 | 10 | 10 |
| kg | lb | |
|---|---|---|
| Base Actuator Weight (Zero Stroke) | 10 | 21 |
| Actuator Weight Adder (Per 25 mm of stroke) | 0.39 | 0.87 |
| Adder for Inline (excluding motor) | 2.9 | 6.5 |
| Adder for Parallel Drive (excluding motor) | 13.1 | 28.9 |
| Adder for Front Flange | 1.9 | 4.2 |
| Adder for Rear Clevis | 5.3 | 11.7 |
| Adder for Rear Eye | 5.1 | 11.3 |
| Adder for Rear Trunnion | 1.9 | 4.3 |
| Base Unit Inertia | Zero Stroke [kg-m^2 (lbf-in-sec^2)] | Add per 25 mm [kg-m^2 (lbf-in-sec^2)] | |
|---|---|---|---|
| —5 mm Lead | 8.27 x 10^-4 (7.32 x 10^-3) | 2.19 x 10^-6 (1.94 x 10^-5) | |
| —10 mm Lead | 8.33 x 10^-4 (7.37 x 10^-3) | 2.42 x 10^-6 (2.14 x 10^-5) | |
| —20 mm Lead | 8.57 x 10^-4 (7.58 x 10^-3) | 3.31 x 10^-6 (2.93 x 10^-5) | |
| Inline Drive Inertia | Inline Unit - w/Motor Coupling | Inline Unit - w/Motor Coupling For Gearbox Mount | Add per 25 mm |
| —5 mm Lead | 9.27 x 10^-4 (8.20 x 10^-3) | 1.09 x 10^-3 (9.62 x 10^-3) | 2.19 x 10^-6 (1.94 x 10^-5) |
| —10 mm Lead | 9.33 x 10^-4 (8.26 X 10^-3) | 1.09 x 10^-3 (9.67 x 10^-3) | 2.42 x 10^-6 (2.14 x 10^-5) |
| —20 mm Lead | 9.57 x 10^-4 (8.47 x 10^-3) | 1.12 x 10^-3 (9.89 x 10^-3) | 3.31 x 10^-6 (2.93 x 10^-5) |
| Parallel Drive Inertia | 1:1 Reduction | 2:1 Reduction | |
| —5 mm Lead (zero stroke) | 4.90 x 10^-3 (4.34 x 10^-2) | 2.22 x 10^-3 (1.97 x 10^-2) | |
| ——Add per 25 mm stroke | 2.19 x 10^-6 (1.94 x 10^-5) | 5.48 x 10^-7 (4.85 x 10^-6) | |
| —10 mm Lead (zero stroke) | 4.91 x 10^-3 (4.34 x 10^-2) | 2.23 x 10^-3 (1.97 x 10^-2) | |
| ——Add per 25 mm stroke | 2.42 x 10^-6 (2.14 x 10^-5) | 6.04 x 10^-7 (5.34 x 10^-6) | |
| —20 mm Lead (zero stroke) | 4.93 x 10^-3 (4.37 x 10^-2) | 2.23 x 10^-3 (1.98 x 10^-2) | |
| ——Add per 25 mm stroke | 3.31 x 10^-6 (2.93 x 10^-5) | 8.28 x 10^-7 (7.33 x 10^-6) |
Printable view
| 5 | 10 | ||
|---|---|---|---|
| Screw Lead | mm | 5 | 10 |
| in | 0.197 | 0.394 | |
| Maximum Force* | kN | 44.5 | 44.5 |
| lbf | 10,000 | 10,000 | |
| Life at Maximum Force | km | 249.2 | 486.3 |
| in x 10^6 | 9.81 | 19.14 | |
| C_a (Dynamic Load Rating)* | kN | 163.7 | 162.4 |
| lbf | 36,800 | 36,500 | |
| Maximum Input Torque | Nm | 46.5 | 82.3 |
| lbf-in | 412 | 728 | |
| Max Rated RPM @ Input Shaft |
RPM | 3,500 | 3,500 |
| Maximum Linear Speed @ Maximum Rated RPM | mm/sec | 292 | 583 |
| in/sec | 11.5 | 23 | |
| Friction Torque | Nm | 2.23 | 2.23 |
| lbf-in | 20 | 20 |
Intermediate and custom stroke lengths are also available. Belt and pulley inertia varies with ratio and motor selection. Please contact your local sales representative.
* Maximum allowable actuator-generated force that can be applied routinely. Exceeding this force may result in permanent damage to the actuator. For high force, short stroke applications, consult factory.
| C_a Derating | |||
|---|---|---|---|
| FTX125 | 05 | 10 | |
| *C_a (Dynamic Load Rating) Greater than 900mm Stroke | kN | 143.4 |
162.4 |
| lbf | 32,240 | 36,500 | |
| kg | lb | |
|---|---|---|
| Base Actuator Weight (Zero Stroke) | 21 | 47 |
| Actuator Weight Adder (Per 25 mm of stroke) | 0.84 | 1.85 |
| Adder for Inline (excluding motor) | 6.8 | 15 |
| Adder for Parallel Drive (excluding motor) | 25.6 | 56.5 |
| Adder for Front Flange | 3.6 | 7.9 |
| Adder for Rear Clevis | 6.5 | 14.3 |
| Adder for Rear Eye | 6.3 | 13.8 |
| Adder for Rear Trunnion | 3.1 | 6.8 |
| Base Unit Inertia | Zero Stroke [kg-m^2 (lb-in-s^2)] | Add per 25 mm [kg-m^2 (lb-in-s^2)] | |
|---|---|---|---|
| —5 mm Lead | 2.55 x 10^-3 (2.26 x 10^-2) | 4.62 x 10^-5 (4.09 x 10^-4) | |
| —10 mm Lead | 2.56 x 1^0-3 (2.27 x 10^-2) | 4.65 x 10^-5 (4.12 x 10^-4) | |
| Inline Drive Inertia | <32 mm Motor Shaft Diameter | >32 mm Motor Shaft Diameter | Add per 25 mm |
| —5 mm Lead | 2.81 x 10^-3 (2.49 x 10^-2) | 3.35 x 10^-3 (2.97 x 10^-2) | 4.62 x 10^-5 (4.09 x 10^-4) |
| —10 mm Lead | 2.82 x 10^-3 (2.50 x 10^-2) | 3.36 x 10^-3 (2.98 x 10^-2) | 4.65 x 10^-5 (4.12 x 10^-4) |
| Parallel Drive Inertia | 1:1 Reduction | 2:1 Reduction | |
| —5 mm Lead (zero stroke) | 9.43 x 10^-3 (8.34 x 10^-2) | 4.66 x 10-3 (4.12 x 10-2) | |
| ——Add per 25 mm stroke | 4.62 x 10^-5 (4.09 x 10^-4) | 1.15 x 10^-5 (1.02 x 10^-4) | |
| —10 mm Lead (zero stroke) | 9.44 x 10^-3 (8.35 x 10^-2) | 4.66 x 10^-3 (4.13 x 10^-2) | |
| ——Add per 25 mm stroke | 4.65 x 10^-5 (4.12 x 10^-4) | 1.16 x 10^-5 (1.03 x 10^-4) |
Printable view
| 6 | 12 | 30 | ||
|---|---|---|---|---|
| Screw Lead | mm | 6 | 12 | 30 |
| in | 0.236 | 0.472 | 1.181 | |
| Maximum Force* | kN | 89 | 89 | 89 |
| lbf | 20,000 | 20,000 | 20,000 | |
| Life at Maximum Force | km | 154.9 | 416.6 | 358.9 |
| in x 10^6 | 6.1 | 16.4 | 21.2 | |
| C_a (Dynamic Load Rating)* | kN | 263.7 | 290.0 | 233.0 |
| lbf | 59,275 | 65,200 | 52,400 | |
| Maximum Input Torque | Nm | 106 | 212 | 531 |
| lbf-in | 940 | 1,880 | 4,699 | |
| Max Rated RPM @ Input Shaft |
RPM | 2,000 | 2,000 | 2,000 |
| Maximum Linear Speed @ Maximum Rated RPM | mm/sec | 201 | 401 | 1,000 |
| in/sec | 7.9 | 15.8 | 39.0 | |
| Friction Torque | Nm | 4.54 | 4.54 | 4.54 |
| lbf-in | 40 | 40 | 40 |
* Maximum allowable actuator-generated force that can be applied routinely. Exceeding this force may result in permanent damage to the actuator. For high force, short stroke applications, consult factory.
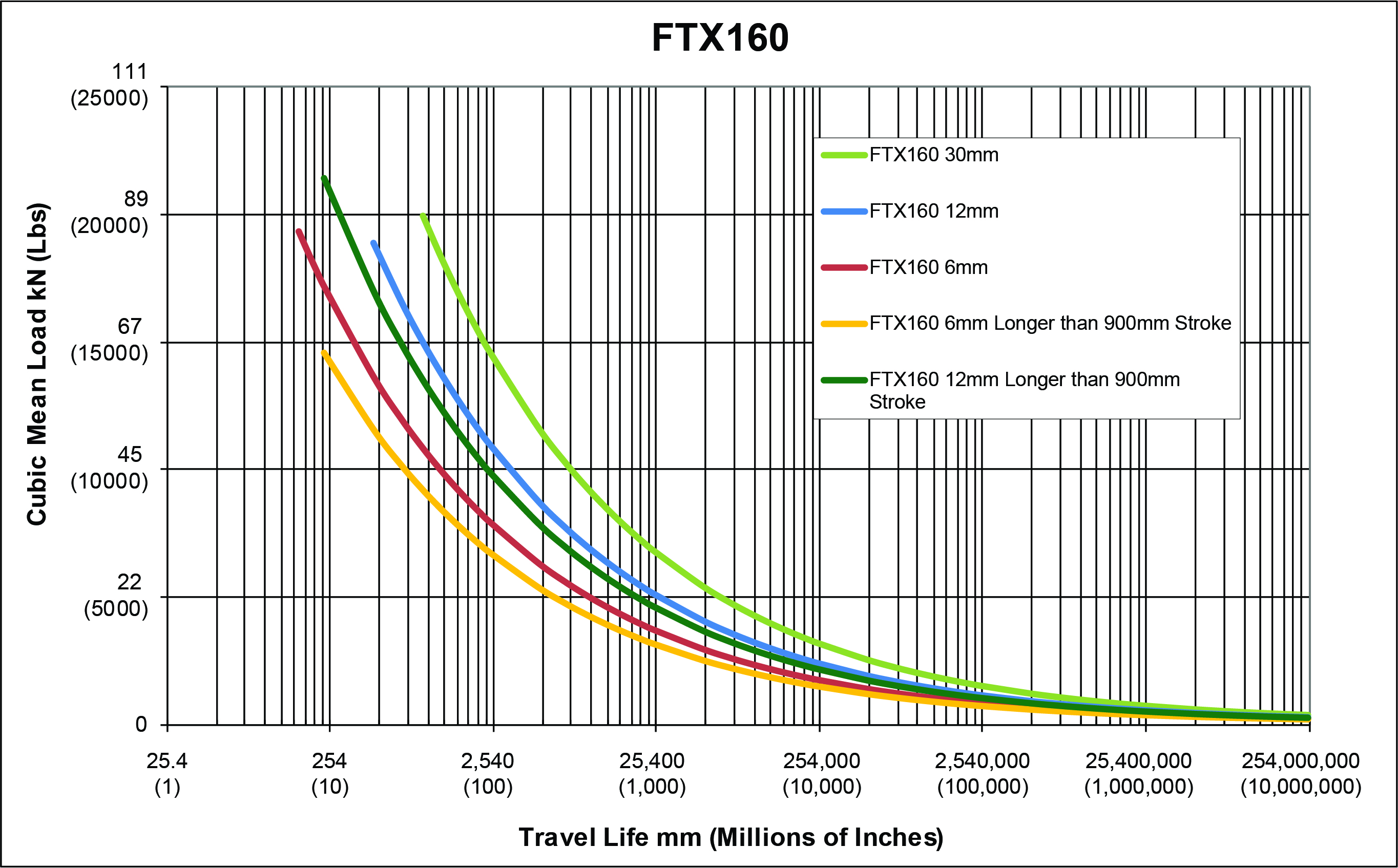
| C_a Derating | ||||
|---|---|---|---|---|
| FTX160 | 06 | 12 | 30 | |
| *C_a (Dynamic Load Rating) Greater than 900mm Stroke | kN | 223.6 | 261.2 | 233 |
| lbf | 50,270 | 58,720 | 52,400 | |
| kg | LB | |
|---|---|---|
| Base Actuator Weight (Zero Stroke) | 49 | 108 |
| Actuator Weight Adder (Per 25 mm of stroke) | 1.62 | 3.6 |
| Adder for Inline (excluding motor) | 14.2 | 31.5 |
| Adder for Parallel Drive (excluding motor) | 53.1 | 117.8 |
| Adder for Front Flange | 7.4 | 16.4 |
| Adder for Rear Clevis | 21.2 | 48.8 |
| Adder for Rear Eye | 22.4 | 49.7 |
| Adder for Rear Trunnion | 10.9 | 24.2 |
| Base Unit Inertia | Zero Stroke [kg-m^2 (lbf-in-sec^2)] | Add per 25 mm [kg-m^2 (lbf-in-sec^2)] | |
|---|---|---|---|
| 6 mm Lead | 1.35 x 10^-2 (1.19 x 10^-1) | 2.57 x 10^-4 (2.27 x 10^-3) | |
| 12 mm Lead | 1.35 x 10^-2 (1.20 x 10^-1) | 2.58 x 10^-4 (2.28 x 10^-3) | |
| 30 mm Lead | 1.38 x 10^-2 (1.22 x 10^-1) | 2.66 x 10^-4 (2.36 x 10^-3) | |
| Inline Drive Inertia | <32 mm Motor Shaft Diameter | >32 mm Motor Shaft Diameter | Add per 25 mm |
| 6 mm Lead | 1.47 x 10^-2 (1.30 x 10^-1) | 1.67 x 10^-2 (1.48 x 10^-1) | 2.57x 10^-4 (2.27 x 10^-3) |
| 12 mm Lead | 1.47 x 10^-2 (1.30 x 10^-1) | 1.68 x 10^-2 (1.49 x 10^-1) | 2.58 x 10^-4 (2.28 x 10^-3) |
| 30 mm Lead | 1.50 x 10^-2 (1.33 x 10^-1) | 1.71 x 10^-2 (1.51 x 10^-1) | 2.66 x 10^-4 (2.36 x 10^-3) |
| Parallel Drive Inertia | 1:1 Reduction | 2:1 Reduction | |
| —6 mm Lead (zero stroke) | 5.27 x 10^-2 (4.67 x 10^-1) | 2.30 x 10^-2 (2.04 x 10^-1) | |
| ——Add per 25 mm stroke | 2.57 x 10^-4 (2.27 x 10^-3) | 6.42 x 10^-5 (5.68 x 10^-4) | |
| —12 mm Lead (zero stroke) | 5.28 x 10^-2 (4.67 x 10^-1) | 2.30 x 10^-2 (2.04 x 10^-1) | |
| ——Add per 25 mm stroke | 2.58 x 10^-4 (2.28 x 10^-3) | 6.45 x 10^-5 (5.71 x 10^-4) | |
| —30 mm Lead (zero stroke) | 5.30 x 10^-2 (4.69 x 10^-1) | 2.31 x 10^-2 (2.05 x 10^-1) | |
| ——Add per 25 mm stroke | 2.66 x 10^-4 (2.36 x 10^-3) | 6.66 x 10^-5 (5.89 x 10^-4) |
Printable view
| 6 | 12 | 30 | ||
|---|---|---|---|---|
| Screw Lead | mm | 6 | 12 | 30 |
| in | 0.236 | 0.472 | 1.181 | |
| Maximum Force* | kN | 177.9 | 177.9 | 177.9 |
| lbf | 40,000 | 40,000 | 40,000 | |
| Life at Maximum Force | km | 78.7 | 161.8 | 414.3 |
| in x 10^6 | 3.1 | 6.4 | 16.3 | |
| C_a (Dynamic Load Rating)* | kN | 398 | 423 | 376 |
| lbf | 89,500 | 95,200 | 84,700 | |
| Maximum Input Torque | Nm | 243 | 425 | 976 |
| lbf-in | 2,148 | 3,760 | 8,642 | |
| Max Rated RPM @ Input Shaft |
RPM | 1,750 | 1,750 | 1,750 |
| Maximum Linear Speed @ Maximum Rated RPM | mm/sec | 175 | 351 | 875 |
| in/sec | 6.9 | 13.8 | 34.4 | |
| Friction Torque | Nm | 5.65 | 5.65 | 5.65 |
| lbf-in | 50 | 50 | 50 |
| C_a Derating | ||||
|---|---|---|---|---|
| FTX215 | 06 | 12 | 30 | |
| *C_a (Dynamic Load Rating) Greater than 900mm Stroke | kN | 359.8 | 346.7 | 376 |
| lbf | 80,900 | 77,950 | 84,700 | |
| kg | lb | |
|---|---|---|
| Base Actuator Weight (Zero Stroke) | 103 | 227 |
| Actuator Weight Adder (Per 25 mm of stroke) | 2.70 | 5.96 |
| Adder for Inline (excluding motor) | 38.6 | 85.1 |
| Adder for Parallel Drive (excluding motor) | 62.3 | 137.3 |
| Adder for Front Flange | 26.7 | 58.8 |
| Adder for Rear Clevis | 32.5 | 71.6 |
| Adder for Rear Eye | 32.5 | 71.6 |
| Adder for Rear Trunnion | 9.6 | 212 |
| Base Unit Inertia | Zero Stroke [kg-m^2 (lbf-in-sec^2)] | Add per 25 mm [kg-m^2 (lbf-in-sec^2)] |
|---|---|---|
| 6 mm Lead | Add per 25 mm, 6 mm Lead | |
| Base Unit - Input Drive Shaft Only | 4.25 x 10^2 (3.76 x 10^1) | 8.00 x 10^4 (7.08 x 10^3) |
| 12 mm Lead | Add per 25 mm, 12 mm Lead | |
| Base Unit - Input Drive Shaft Only | 4.26 x 10^2 (3.77 x 10^1) | 8.02 x 10^4 (7.10 x 10^3) |
| 30 mm Lead | Add per 25 mm, 30 mm Lead | |
| Base Unit - Input Drive Shaft Only | 4.31 x 10^2 (3.82 x 10^1) | 8.15 x 10^4 (7.21 x 10^3) |
| Inline Drive Inertia | 6 mm Lead | Add per 25 mm, 6 mm Lead |
| Inline Unit - w/Motor Coupling | 4.43 x 10^2 (3.92 x 10^1) | 8.00 x 10^4 (7.08 x 10^3) |
| Inline Unit - w/Motor Coupling >55mm Shaft Diameter | 6.15 x 10^2 (5.44 x 10^1) | 8.00 x 10^4 (7.08 x 10^3) |
| 12 mm Lead | Add per 25 mm, 12 mm Lead | |
| Inline Unit - w/Motor Coupling | 4.44 x 10^2 (3.93 x 10^1) | 8.02 x 10^4 (7.10 x 10^3) |
| Inline Unit - w/Motor Coupling >55mm Shaft Diameter | 6.16 x 10^2 (5.45 x 10^1) | 8.02 x 10^4 (7.10 x 10^3) |
| 30 mm Lead | Add per 25 mm, 30 mm Lead | |
| Inline Unit - w/Motor Coupling | 4.49 x 10^2 (3.98 x 10^1) | 8.15 x 10^4 (7.21 x 10^3) |
| Inline Unit - w/Motor Coupling >55mm Shaft Diameter | 6.21 x 10^2 (5.50 x 10^1) | 8.15 x 10^4 (7.21 x 10^3) |
| Parallel Drive Inertia | 6 mm Lead | Add per 25 mm, 6 mm Lead |
| 1:1 Reduction Parallel Belt Drive | 8.73 x 10^2 (7.72 x 10^1) | 8.00 x 10^4 (7.08 x 10^3) |
| 2:1 Reduction Parallel Belt Drive | 3.14 x 10^2 (2.78 x 10^1) | 2.00 x 10^4 (1.77 x 10^3) |
| 12 mm Lead | Add per 25 mm, 12 mm Lead | |
| 1:1 Reduction Parallel Belt Drive | 8.74 x 10^2 (7.73 x 10^1) | 8.02 x 10^4 (7.10 x 10^3) |
| 2:1 Reduction Parallel Belt Drive | 3.14 x 10^2 (2.78 x 10^1) | 2.01 x 10^4 (1.78 x 10^3) |
| 30 mm Lead | Add per 25 mm, 30 mm Lead | |
| 1:1 Reduction Parallel Belt Drive | 8.79 x 10^2 (7.78 x 10^1) | 8.15 x 10^4 (7.21 x 10^3) |
Printable view
Catalogs, Brochures, and Success Stories
Manuals and Technical Tips
Find more resources in our InfoCenter.
Cost comparison of a roller screw to a ball screw is really a difficult subject, mainly because we have to take into account the differences in the pieces that we are comparing. A roller screw is typically going to be competitive to a ball screw in regards to price because we can oftentimes use a roller screw that is smaller in size compared to its “equivalent” ball screw. This is because of the significant life advantage roller screws have. Therefore, if you are using a smaller frame size roller screw and comparing that to a larger size ball screw, with similar life expectancies, your pricing is going to be very similar. Now depending on what your needs are, if you are looking for something with much greater life, we’re not necessarily comparing an equal product. So you may have to buy two ball screws in comparison to one roller screw. If you look at that from a value standpoint, you may pay more for a similar frame size roller screw but you may have to buy two ball screws in the same period of time that you would have to buy that one roller screw.
Below is the maximum-allowable duty cycle for your application given the percentage of input current over the continuous current rating:
For example: If your actuator has a continuous current rating of 10 A and a continuous force rating of 1000 lbf, this means it will take about 10 A to produce 1000 lbf of force, or 5 A to produce 500 lbf of force, and so on. What if you need to push more than 1000 lbf? In most cases, you would look at a stronger stator or a larger actuator. What if it’s only for a few seconds? Could you over-work the current actuator? Well the answer is yes, and calculating by how much isn’t too difficult.
Let’s say you need to push 1500 lbf. This would be equivalent to 1.5x the continuous current rating of 10 A. If you look below, the graph recommends no more than a 22% duty cycle in this case. This means you can run the actuator 22% of the time at 15 A without overheating. The other 78% of the time, it needs to be off/cooling.
How long can you run at peak current?
Not a simple question, nor a simple answer. In reality, so many things affect this (how the system is built and how well the actuator is able to dissipate heat, are there additional heat sinks, particles in the air, degree of vacuum, new starting temp each time? (i.e. doesn’t always start from cold, etc.). Therefore, accurate times and temperature are quite difficult to estimate.
For example: At peak current (2x Continuous), the allowable duty cycle is 4%. That doesn’t mean you can run for 4 hours straight as long as you have 96 hours of off time in between however. From experience, a good rule of thumb we’ve estimated is 30s to a minute of peak current run time. Try to keep it under that, and then of course allow it to cool for the other 96% of the time.
That is going to depend on the application, but with equivalent specifications and characteristics, a roller screw actuator will typically be very similar in size to (sometimes slightly larger than) a comparable hydraulic cylinder. Hydraulics are always going to have their place in the market once you get beyond 100,000 lbs. of force, but anywhere an electromechanical roller screw actuator fits the bill, size will be very similar.
We are asked about re-lubrication intervals a lot. The reality is that there is no generic interval to re-lube actuators. It depends on so many things and every application and situation is different, it is nearly impossible to accurately calculate a re-lube interval per application. So instead, we have a rough guideline table (shown below) to give users an idea on when to start checking for old contaminated grease that needs to be replaced. However, since ambient temperature, heat dissipation, speed variation, particles in the air, etc. can vary so much from application to application, this is only a guideline. The actuator should be checked more frequently around the period this table suggests and once it is noticed that the grease is ready to be replaced (Dirty, contaminated / very dark, filled with particles / debris) – a re-lube interval can be determined.
Remember, grease needs to be cleaned out and replaced – don’t just insert more. (Except for FTX’s, those can handle 5-6 greasings before they need to be cleaned out)
| RMS ROTATIONAL SPEED (RPM) | RECOMMENDED GREASE RENEWAL PERIOD (HOURS) |
|---|---|
| 250 | 10,000 |
| 500 | 10,000 |
| 1000 | 8000 |
| 1500 | 7000 |
| 2000 | 5800 |
| 2500 | 5000 |
| 3000 | 4000 |
Electric actuators offer high speed and force, are flexible and easily programmable for a variety of load conditions, have high accuracy and repeatability, are efficient, simple to install, require little maintenance, and are environmentally friendly.
By not using a hydraulic system, the user can eliminate oil leaks, reduce pollution, and improve worker safety. Electric actuators are also a non-toxic solution, especially in the food industry
A very common question for us. For the actuator itself, that is easy. There is a mechanical lead accuracy of the screw, which is usually 0.001 in/ft, a typical specification for precision positioning screws of any type. This means that at any point over the cumulative length of the screw, the lead will vary by a maximum of 0.001 inches per foot of screw length. This is not the same as mechanical repeatability. The mechanical repeatability is a tolerance on how close to the same linear position the screw will return, if approaching from the same direction, and driven exactly the same number of turns. This value is approximately 0.0004 inches.
The electronic positioning resolution is a function of the feedback device and the servo amplifier. Let’s assume that we have Exlar’s standard encoder on a GSX30 with 0.2 inches per revolution lead on the roller screw. Exlar’s standard encoder has 2048 lines and 8192 electronic pulses per revolution that it outputs to the servo drive. So in a perfect world, the positioning resolution would be (0.2 in/rev)/ (8192 pulses/rev) or 0.0000244 inches. Anyone who has used servo drives knows that you can’t position to one encoder pulse. Let’s use 10 encoder pulses as a reasonable best positioning capability. This gives us a positioning resolution of 0.000244 inches.
More things to consider: When addressing repeatability and accuracy, several things must also be taken into account. One of these is the stiffness of the system. Stiffness is how much the system will stretch or compress under compressive or tensile forces. If the combination of the stiffness of the actuator and the stiffness of the mechanical system, including all couplings, mounting surface, etc. allows for more compression or stretch than the required positioning resolution of the system, obtaining acceptable positioning results will be nearly impossible. Another consideration is thermal expansion and contraction. Consider a GS actuator attached to a tool that is doing a precision grinding process. Assuming that the tool is steel and 12 inches long, a 5 degree rise in temperature will cause the tool to expand by 0.0006 inches. If the system is programmed to make 0.0002 inch moves, this expansion could cause serious positioning problems. The same applies to the components of the actuator itself. The actuator rod can change in temperature from a cold start up to running temperature. This change may need to be accounted for in very precise positioning applications.
The maintenance schedule for any geared mechanical device, whether ball screw, roller screw, or gearhead, is going to be based on the amount of heat that is generated in the application, the amount of degradation of the grease, the type of grease being used, and the duty cycle. We provide some guidelines for our customers as starting points, but we recommend that for all new installations the lubrication be periodically inspected for presence and degradation as the best method for determining the right maintenance schedule for a given application. Having said that, we’ve seen repairs of units that have been in use for 15 years and when we’ve asked about grease renewal, they didn’t even realize that the unit could be serviced in the field. So we’ve had situations like that where they’ve gone for long periods of time with effectively no maintenance or no grease renewal. There are other applications that require grease renewal in very short intervals just due to the nature of the application.
On a conventional roller screw design package, there typically is an anti-rotation groove designed into the housing, and a tab designed into the nut that rides in the housing groove as the actuator extends and retracts. In regards to the inverted roller screw design, part of the installation or the application requirement is going to be having that shaft solidly mounted a machine coupling or tooling on the machine otherwise providing some sort of external anti-rotation device on that output shaft. There are other ways of using splines and different types of non-circular output shafts that can allow for different types of spline nuts that will provide anti-rotation, but typically you’re going to see that mounted on the machine.
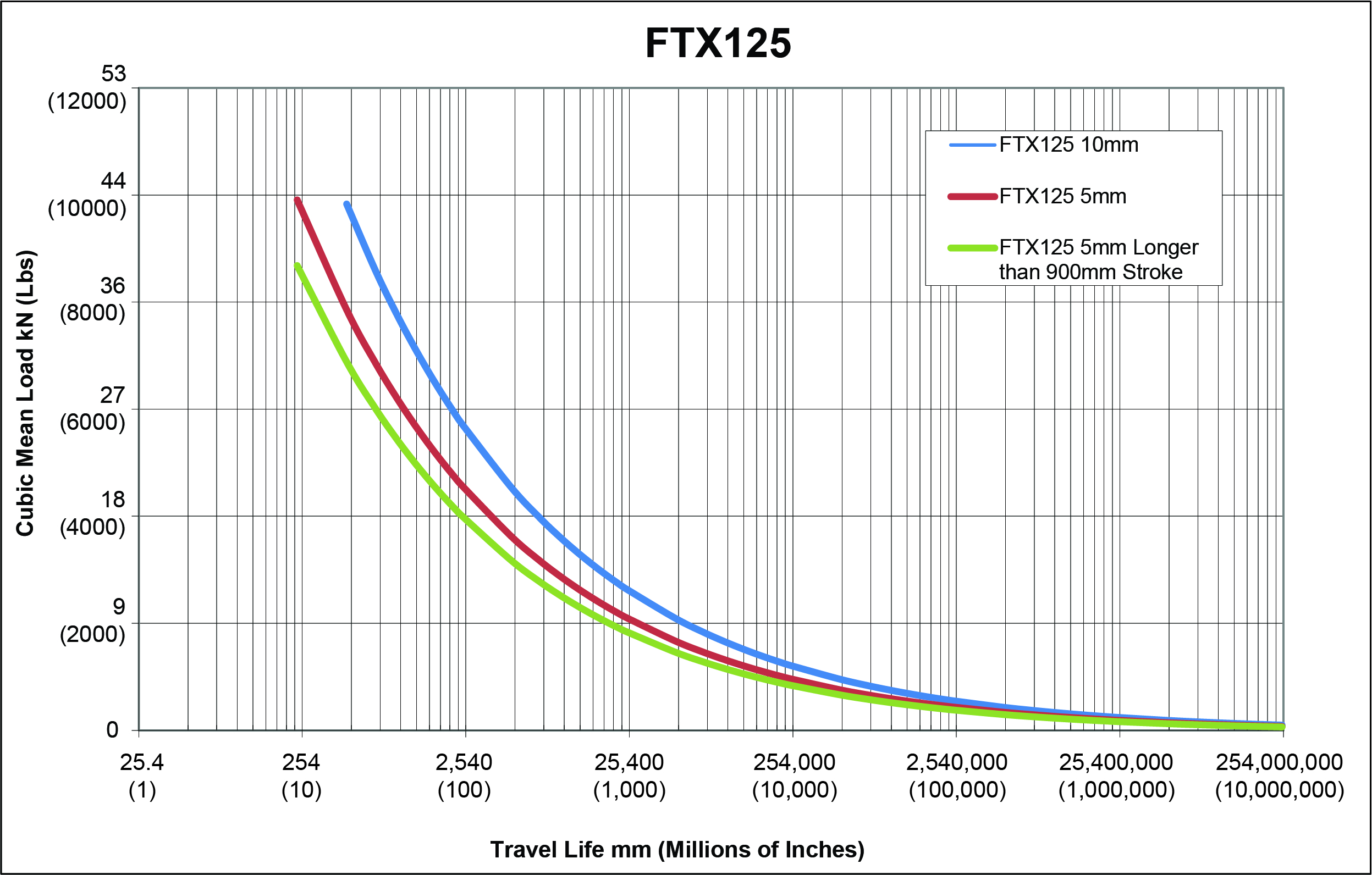
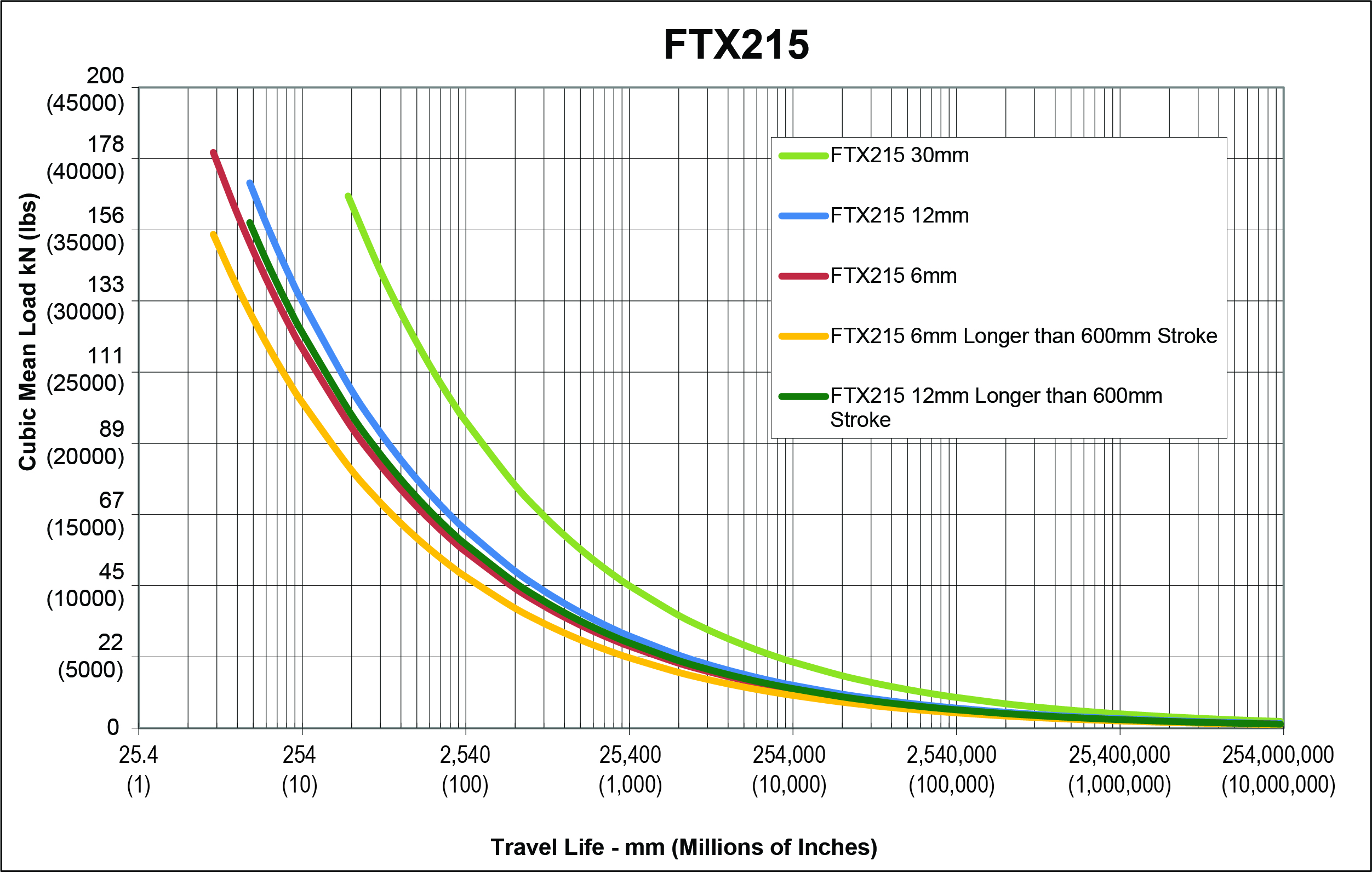
The L10 expected life of a roller screw linear actuator is expressed as the linear travel distance that 90% of properly maintained roller screws manufactured are expected to meet or exceed. This calculation should be used for estimation purposes only.
The underlying formula that defines this value is: Travel life in millions of inches, where:
Ca= Dynamic load rating (lbf)
Fcml= Cubic mean applied load (lbf)
ℓ = Roller screw lead (inches)
For additional details on calculating estimated service life, please refer www.cw-actuation.com.
L10=(Ca)3 x ℓ Fcm
Please log in or register to use our quote request tool, with this you can view and download 3D and 2D models and drawings, as well as build and submit a quote request.
If you do not have a login, please proceed to the registration page
If you currently have an Exlar website account and would like to delete it, please contact